李群和李代数
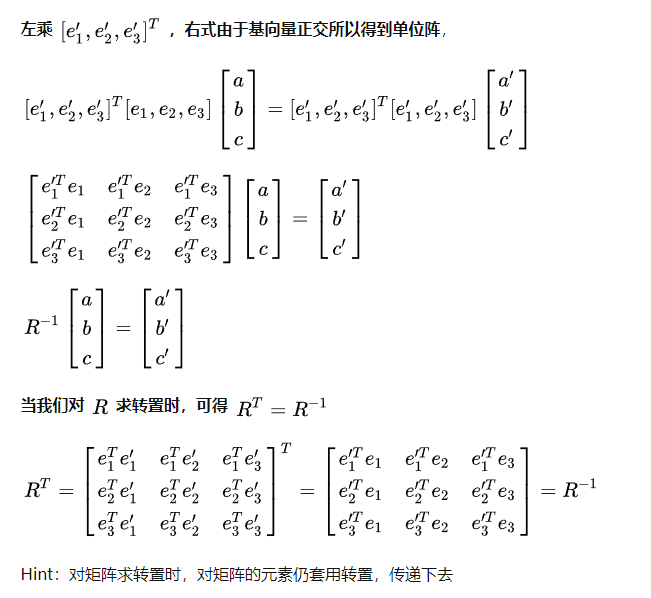
- 旋转矩阵为什么是正交阵?
R的行列数为1
- 为什么引入李代数?
李群无法加法运算,无法求导
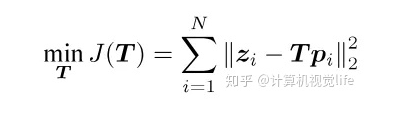
z为相机上的观测数据;T为变换矩阵;P为空间中的一点。
对上式子求导找到极值点。
- 李群和李代数的关系?
李代数是李群的切空间
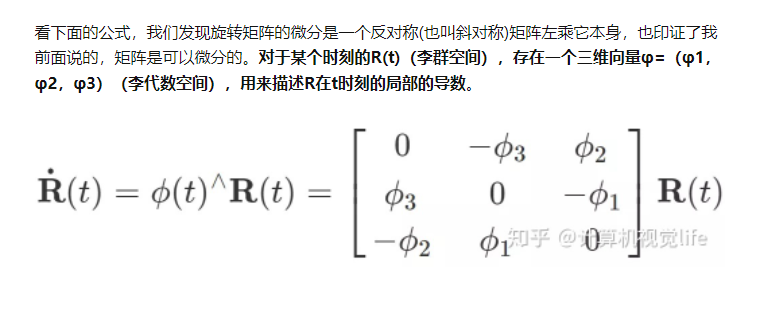
- 什么是反对称矩阵?
旋转矩阵的微分 =是一个反对称(也叫斜对称)矩阵 * 它本身 (如上式)
所以aii = -aii 得出 对角线元素为0
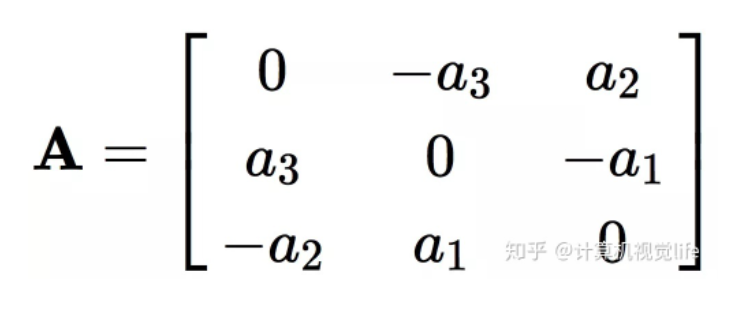
对应3个自由度
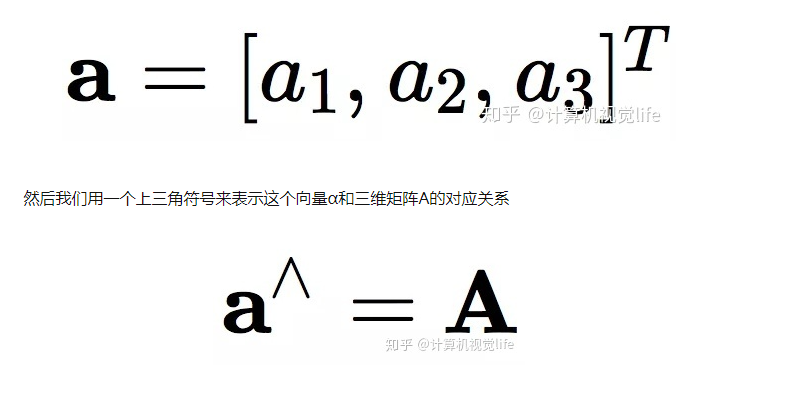
进而求出矩阵和向量的关系
- 指数映射?
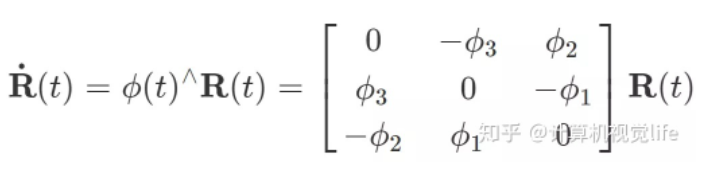
这个向量φ=(φ1,φ2,φ3)反应了R的导数性质
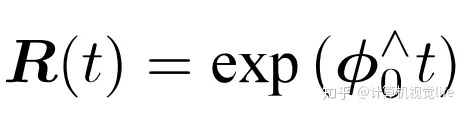
李代数小so(3)是三维向量φ的集合,每个向量φi的反对称矩阵都可以表达李群(大SO(3))上旋转矩阵R的导数,而R和φ是一个指数映射关系。
也就是说,李群空间的任意一个旋转矩阵R都可以用李代数空间的一个向量的反对称矩阵指数来近似。
指数的泰勒展开:


三维向量 φ = θa,a是一个长度为1的方向向量 旋转轴+旋转角 = 旋转向量 = 李代数 =也可以说是反对称矩阵
有旋转矩阵、旋转向量、欧拉角、四元数,而罗德里格斯公式是表示从旋转向量到旋转矩阵的转换过程的
旋转向量就是这里的李代数
小so(3)的李代数空间就是由旋转向量组成的的空间,其物体意义就是旋转向量。
而前面结论中的指数映射关系就是罗德里格斯公式,他们在数学上本质是一样的
说旋转矩阵的导数可以由其对应的旋转向量指定,指导如何在旋转矩阵中进行微积分运算。